Sanctuary AI Runs Zero-Shot Cube Rotation on Real Hydraulic Hand
- A robotic hand reorients a cube to a target position ten consecutive times without dropping it.
- The system uses dexterous manipulation policies trained in simulation and executed on real hardware without modification.
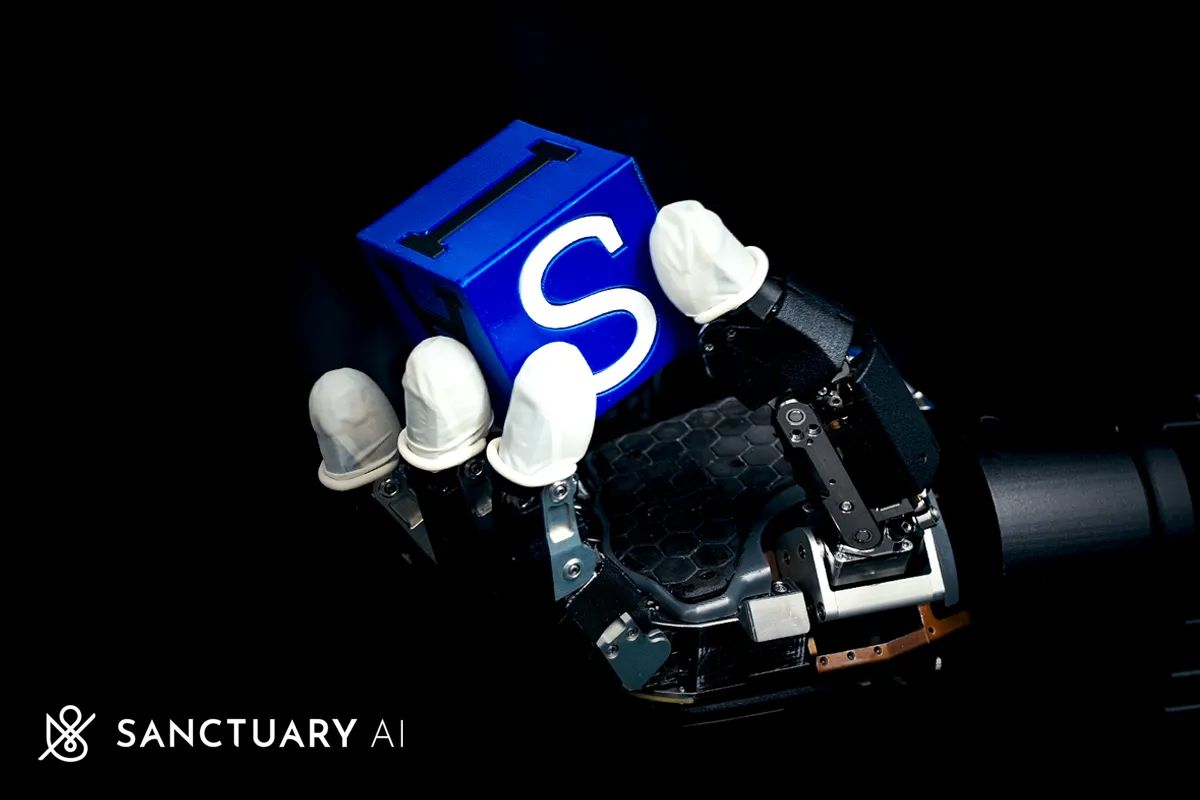
Sanctuary AI shared a new demo focused on zero-shot in-hand manipulation with its hydraulic robotic hand. The system applies dexterous manipulation policies trained entirely in simulation directly to the real system, where the hand rotates a lettered cube to match a target orientation shown on screen. It completes the sequence ten times in a row without dropping the object.
Source: YouTube / Sanctuary AI
All of the motion is handled at the fingertips, with no help from the palm. The hand maintains a stable grasp while continuously reorienting the cube to reach the target orientation. It does this using multiple active degrees of freedom, including finger abduction, along with hydraulic actuation that provides strength, speed, and control.
The goal is to align the object to a specified pose and repeat it consistently. The system completes the sequence ten times, reaching the target orientation each time without dropping the cube. This requires continuous in-hand reorientation while maintaining a stable grasp. Sanctuary AI describes this as a test of whether a policy trained in simulation can transfer directly to the real system, and notes the complexity of simulating hands with many degrees of freedom and contact interactions. This capability is a foundation for tasks such as precise insertion and tool use.
🌀 Tom’s Take:
Zero-shot only matters if it holds up outside simulation. Running the same policy on real hardware without adjustment and getting consistent results is what turns it from a training setup into something usable.
Source: Sanctuary AI