NODAR Releases Software-Only 3D Perception Tools for Any Camera Platform
- NODAR’s stereo vision engine is now available as licensable software, decoupled from proprietary hardware.
- The SDK allows OEMs to generate real-time 3D point clouds using existing stereo cameras and compute systems.
NODAR, known for its ultra-wide-baseline stereo vision systems, has released its 3D perception technology as standalone software products for the first time. Until now, the company’s patented algorithms were only available through integrated hardware-software development kits. With the new NODAR SDK, OEMs and developers across automotive, agriculture, robotics, rail, marine, aviation, and industrial sectors can license and deploy long-range stereo vision using their own cameras and compute platforms.
“Our goal is to make long-range 3D perception accessible to any autonomy platform,” said Leaf Jiang, Founder and CEO of NODAR, in a press release. “Offering our technology as software-only products simplifies evaluation and deployment using cameras and compute teams already trust.”
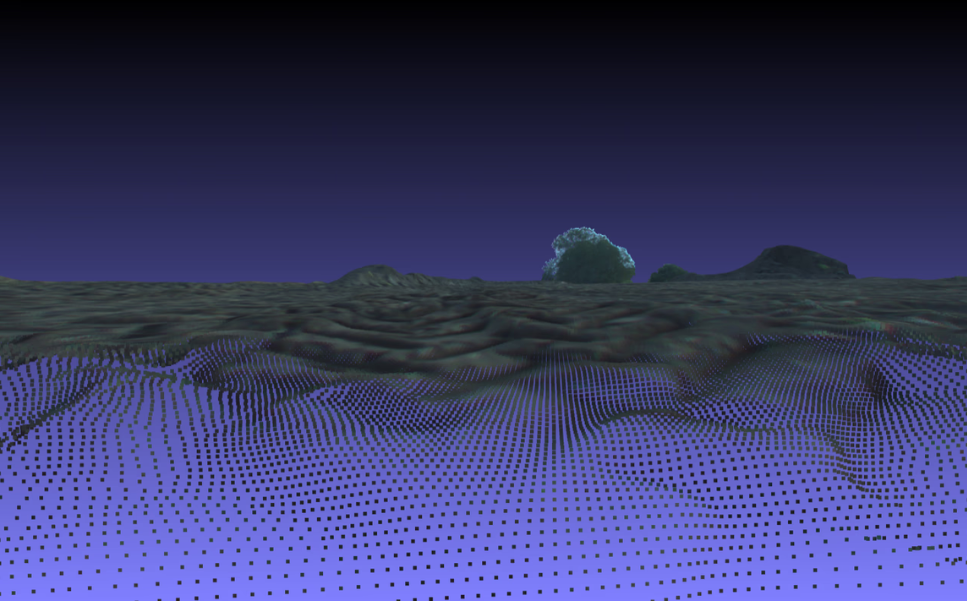
The core product, Hammerhead, processes stereo image pairs to produce high-density 3D point clouds with centimeter-level accuracy at long range. It’s designed to perform reliably in challenging conditions like dust, fog, rain, glare, vibration, and low light. GridDetect, an optional add-on, interprets Hammerhead’s depth data to detect objects, estimate their size, track motion, and generate outputs for use in ADAS, collision avoidance, robotics, agricultural autonomy, and industrial monitoring.
By separating software from hardware, NODAR gives OEMs and developers the flexibility to work with their own stereo camera setups and preferred compute platforms. The SDK is available now and includes integration libraries for C++ and Python.
🌀 Tom’s Take:
Decoupling perception from hardware unlocks distribution through faster evaluation, leaner stacks, and broader adoption.
Source: Business Wire / NODAR